Teledyne Marine’s gliders and acoustic modems have become key enabling technologies for the remote transmission and collection of data from the National Science Foundations Ocean Observatories Initiative.
OVERVIEW
Teledyne Webb Slocum electric gliders and Teledyne Benthos acoustic modems are a key part of the Ocean Observatories Initiative (OOI), a National Science Foundation (NSF)-funded program for long term observation of the world’s oceans. A description of OOI from the oceanobservatories.org website:
The Ocean Observatories Initiative (OOI) is a science-driven ocean observing network that delivers real-time data from more than 800 instruments to address critical science questions regarding the world’s ocean. OOI data are freely avail- able online to anyone with an Internet connection.
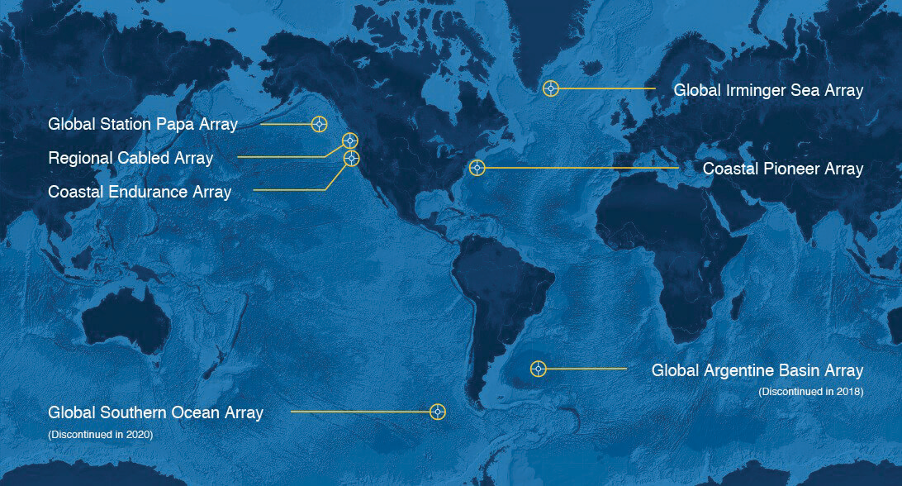 Left: OOI Array Locations. Image: National Science Foundation’s Ocean Observatories Initiative.1
Left: OOI Array Locations. Image: National Science Foundation’s Ocean Observatories Initiative.1
The OOI project comprises numerous data collection mooring arrays and gliders. Some OOI moorings are cabled to shore, while others have surface buoys which can be used for data offload. For moorings with surface expressions, inductive modems are used to trans- fer data from instruments up to 1500 meters deep, and acoustic modems used to communicate with deeper instruments. Others, such as Global Station Papa, have completely submerged elements that rely on a data truck scheme to exfiltrate collected data using acoustic modems. In this case inductive modems are used to gather data from the sensors for eventual offload via acoustic modem to the data truck AUV. The submerged mooring array with data truck offload is the case being considered here.
The OOI was commissioned and accepted by the NSF in 2016 and has been steadily delivering data from across the OOI through the Internet 24/7/365.
Moorings
OOI moorings house different types of sensors, depending on the observation needs at each location. In the cases where a data truck exfiltration is needed, the mooring sensors produce data which is aggregated and multiplexed by a microprocessor. This multiplexed data stream is then pushed to a Teledyne Benthos acoustic modem operating in data logger mode. The acoustic modem is in an OEM form factor and incorporated into the OOI mooring design, with power supplied by the mooring and all cabling internal to the system.
The Teledyne Benthos modem collects the data and logs it in its internal data logger. There are two channels of data collected via different serial ports on the modem: one contains the aggregated and multiplexed sensor measurement data while the other collects engineering status information. The two channels are maintained independently within the modem until a glider initiates retrieval.
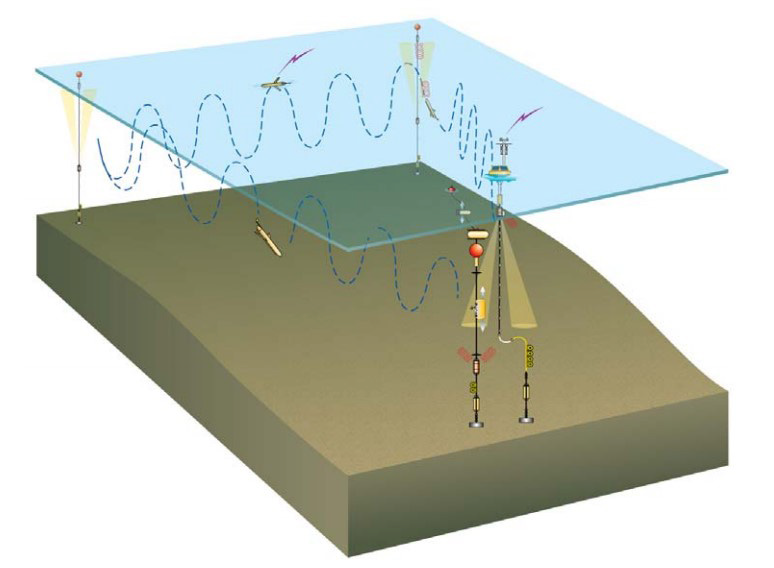 OOI Global Array showing glider serving as data truck for the three subsea corner nodes. Image: National Science Foundation’s Ocean Observatories Initiative.
OOI Global Array showing glider serving as data truck for the three subsea corner nodes. Image: National Science Foundation’s Ocean Observatories Initiative.
Gliders
OOI glider deployments are one of three varieties: coastal, open ocean, and global. Coastal and open ocean deployments have glider depth requirements of 200 and 1000 meters, respectively, but neither uses acoustic modems for data exfiltration. The data truck application using acoustic modems is part of the global glider deployment type and requires glider depths up to 1000 meters.
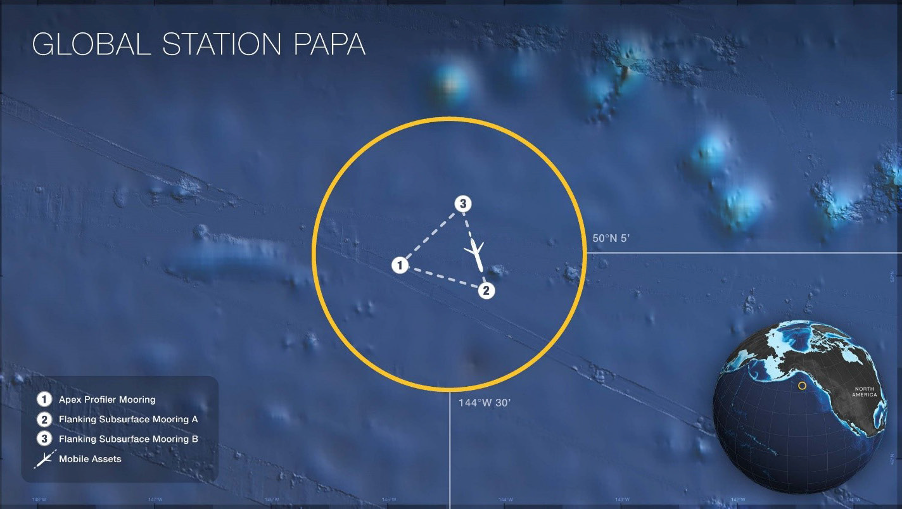
In the specific case of OOI global arrays, each array comprises three taut subsea moorings and one surface mooring arranged in a triangle. The subsea moorings are battery powered and acoustically linked to gliders serving as data trucks. One or more gliders service the array, flying be- tween each point of the triangle in turn and communicating with the instrumentation. Periodically the glider will surface to transmit the offload- ed data to the shore station for processing and distribution to the scientific community.
When a glider approaches a mooring to collect data, it has knowledge of which chunks of data it has already offloaded, and which gaps it needs to fill in due to incomplete transfers in earlier attempts. It will also check to see if new data is available for offload. When a data retrieval session begins, the glider quiets its mechanical systems and performs a “drift at depth” operation for the duration of data collection.
Using the on-board acoustic modem, the glider issues a request for the data it needs to collect and listens for responses from the mooring modem that is storing the data in its logger. The glider mission specifies various data collection parameters such as how many attempts it will make to collect the data and how long each data collection attempt may last. The offload happens within the bounds of these parameters, and the glider delivers the retrieved data to the shore station when surfaced. The offloaded vs. remaining data is tabulated and the same sequence recurs upon the next site visitation.
Performance
The plot shows volume of data generated on one of the OOI global moorings (in red) versus data collected by the data truck glider (in blue). The period shown is from July 2013 through mid-January 2014.
Initially the glider had been misconfigured for very short collection periods, resulting in a widening gap between data generated and collected. In early December 2013, the configuration error was discovered and at that point the graph shows a dramatic inflection upward in the volume of data offloaded by the data truck. The gap was completely closed by January 21, 2014 and the data truck has been delivering 100% of the generated data since.
 OOI Global Array showing glider serving as data truck for the three subsea corner nodes. Image: National Science Foundation’s Ocean Observatories Initiative
OOI Global Array showing glider serving as data truck for the three subsea corner nodes. Image: National Science Foundation’s Ocean Observatories Initiative
Conclusion
AUV-based data trucks are a viable method for retrieving collected data from submerged instrument platforms that are not easily accessed by other means. Long deployment lengths and ability to service multiple sites in a region provide a persistent offload mechanism for remote data collection. AUV- and acoustic modem-based data trucks are best suited for applications where data volumes are moderate and some latency can be tolerated, as the data is transferred in discrete batches when the AUV surfaces.
Teledyne acoustic modem and AUV technology have been successfully deployed in data truck applications in the field. Teledyne modems have a proven history of integrating with Teledyne AUVs and those of other vendors. Reliable acoustic modem transmission technology and data logging capabilities make Teledyne Benthos modems an excellent choice for inclusion in any subsea telemetry application, including data truck exfiltration schemes. Teledyne AUVs with their mission planning tools and history of integration are a natural fit with the Benthos modems when designing a data truck application.
1https://www.oceanobservatories.org
More details about the Ocean Observatories Initiative at: www.oceanobservatories.org
Learn more about Teledyne Benthos Acoustic Modems at: www.teledynemarine.com/acoustic-modems
Learn more about Teledyne Webb Research gliders at: www.teledynemarine.com/autonomous-underwater-gliders