“While testing of autonomous technology is exciting on its own, our primary purpose was to find out if subsea inspection can be conducted more cost-efficiently and with better and more precise data quality with this new technology and associated methods. The conclusion is definitely ‘yes’. The development of the AID is an R&D project that is likely to deliver significant value to Aker BP in the coming years,” says Jarle Marius Solland, Operations Manager at Aker BP.
The AID project is a strategic partnership between DeepOcean, Argus Remote systems and Vaarst where a system has been developed with industry guidance, support, and funding from Aker BP to bring a platform to market. The AID could potentially disrupt the way subsea inspections are conducted.
Ten-day inspection campaign
As part of a ten-day inspection campaign, Aker BP and DeepOcean inspected subsea trees and other subsea infrastructure at the Alvheim subsea field on the Norwegian continental shelf.
“The first inspection trial was highly encouraging. Based on this, we believe we can inspect the specific subsea infrastructure at Alvheim noticeably faster next year,” says Kristoffer Johansen, Technology Manager at DeepOcean.
The subsea inspection missions were planned in advance by inspection personnel from DeepOcean. The mission plans were subsequently transferred from the digital mission planner by API (application programming interface) into the AID. This input can come from both onshore and offshore.
The AID was mobilized on the DeepOcean-operated subsea IMR and ROV support vessel Edda Fauna, replacing the existing observation class ROV. The mission control was supervised both locally from Edda Fauna and remotely from Remota’s remote operations center (ROC) in Haugesund, Norway.
“The combination of autonomous subsea inspections and remotely operated mission control is obviously a highly attractive proposition for operators as it means substantial reductions in operating costs, emissions and HSE risk. The stability of the system was very impressive under mission control,” says Terje Nordeide, Project Manager at DeepOcean.
High quality data collection
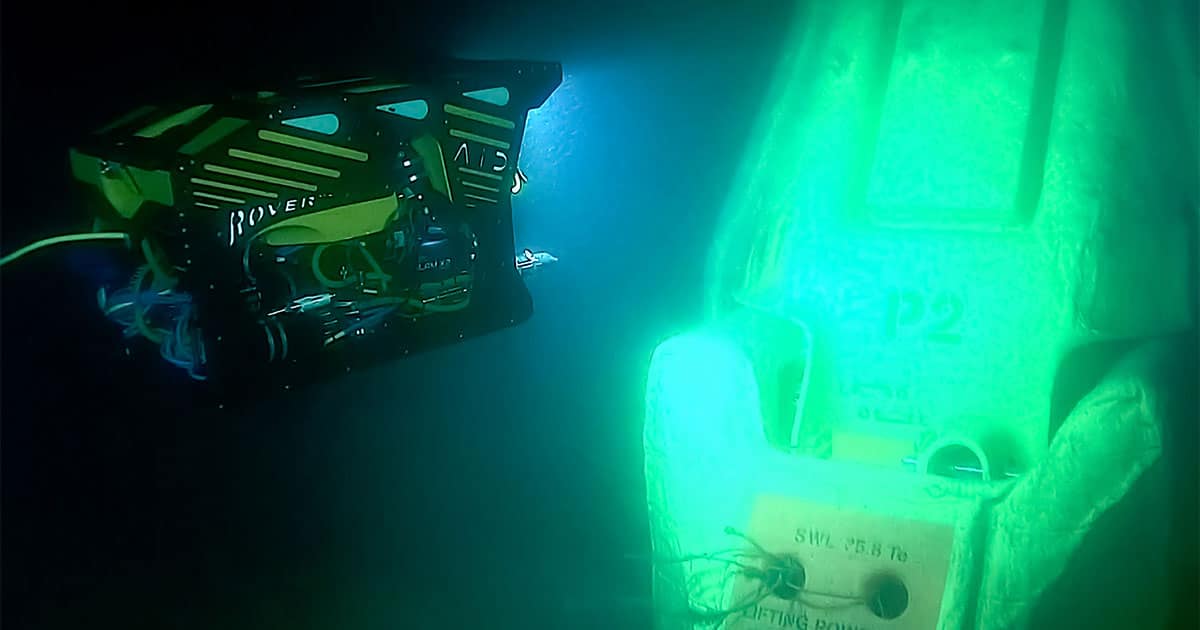
The AID is based on a Rover MK2 ROV from Argus Remote Systems, with upgraded hardware and software packages. Argus is responsible for the AID platform and navigation algorithm. DeepOcean is responsible for the digital twin platform, mission planner software and live view of the AID in operation, while Vaarst is responsible for machine vision camera “Subslam 2x” for autonomous navigation and data collection.
The inspection data from the AID is streamed onshore and the position of the vehicle is continuously being streamed back into the digital twin to ensure high data quality and increase situational awareness.
“For this first trial, we experienced more stable flying with the AID including very stable navigation during inspections. As a result, the collected data used for post-processing of 3D models shows extraordinarily high quality,” adds Kristoffer Johansen.
The AID measures 1.25x 0.85 x 0.77 meters and weighs 320 kilograms in air and can operate in water depths down to 3,000 meters. It can fly in DP mode and has both station keeping and remote control functionalities.
DeepOcean has further developed the AID’s capabilities, demonstrating subsea metrology on demand and improved efficiency.