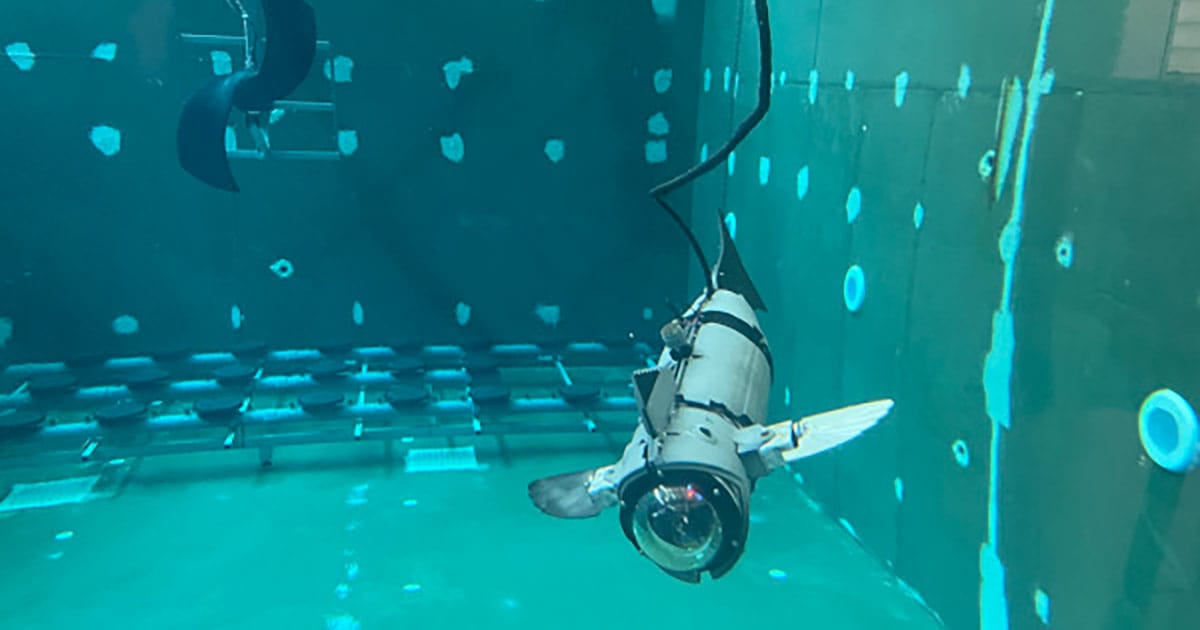
The biomimetic platform has been designed to minimize environmental disturbance and reduce stress in fish by using bio-inspired undulatory propulsion, which lowers mechanical noise, hydraulic turbulence and physical disruption. The system is equipped with a modular sensing system for real-time data acquisition and image transmission, with hybrid communication capabilities via cable or acoustic modem. It features a panoramic vision system with a 180-degree field of view and can operate at depths of up to 20 meters, with remote control ranges of up to 150 meters vertically and 500 meters horizontally.
UJIFISH incorporates sensors for continuous measurement of water temperature and depth, with the option to integrate additional sensors to monitor parameters such as salinity, pH, dissolved oxygen, and gases. It enables direct inspection of net structures and monitoring of environmental conditions around fish and includes a deployment system for transporting and releasing auxiliary components at specific locations. Its geometry and movement have been scaled to match adult fish, producing smoother hydrodynamic profiles and reducing acoustic disturbance.
Experimental results have confirmed the prototype’s functional viability, demonstrating high maneuverability and reliable target detection accuracy in controlled tests involving net inspection, teleoperation, data collection, and sensor deployment. According to the research team, the flexibility of UJIFISH-I is essential in aquaculture environments, where monitoring requirements and technological constraints vary depending on species, infrastructure, and environmental conditions.
UJIFISH-I represents a significant step forward in precision aquaculture and underwater robotics, supporting environmentally responsible operations and reducing the need for human intervention in hazardous underwater environments. Future developments will focus on improving autonomy, endurance, and sensing capabilities, including the integration of advanced sensors and an artificial swim bladder system for active buoyancy control, enabling greater depth ranges and improved energy efficiency.
The project is part of the ThinkInAzul program, supported by the Spanish Ministry of Science and Innovation, the European Union NextGenerationEU funds, and the Generalitat Valenciana. The prototype has been tested at CIRTESU’s water tank facilities and at Port Castelló.